Minimum Obstacle Removal to Reach Corner
HardYou are given a 0-indexed 2D integer array grid of size m x n. Each cell has one of two values:
0represents an empty cell,1represents an obstacle that may be removed.
You can move up, down, left, or right from and to an empty cell.
Return the minimum number of obstacles to remove so you can move from the upper left corner (0, 0) to the lower right corner (m - 1, n - 1).
Example 1:

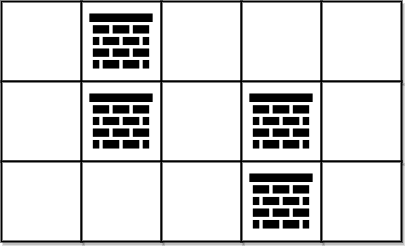
Input: grid = [[0,1,1],[1,1,0],[1,1,0]] Output: 2 Explanation: We can remove the obstacles at (0, 1) and (0, 2) to create a path from (0, 0) to (2, 2). It can be shown that we need to remove at least 2 obstacles, so we return 2. Note that there may be other ways to remove 2 obstacles to create a path.
Example 2:
Input: grid = [[0,1,0,0,0],[0,1,0,1,0],[0,0,0,1,0]] Output: 0 Explanation: We can move from (0, 0) to (2, 4) without removing any obstacles, so we return 0.
Constraints:
m == grid.lengthn == grid[i].length1 <= m, n <= 1052 <= m * n <= 105grid[i][j]is either0or1.grid[0][0] == grid[m - 1][n - 1] == 0
Solution
Clarifying Questions
When you get asked this question in a real-life environment, it will often be ambiguous (especially at FAANG). Make sure to ask these questions in that case:
- What are the dimensions of the grid, and what are the maximum possible values for the dimensions (number of rows and columns)?
- Can the values in the grid be anything other than 0 or 1?
- Is it always guaranteed that a path exists from the top-left corner to the bottom-right corner?
- If a path doesn't exist even after removing all obstacles, what should I return?
- Is the input grid guaranteed to be rectangular (i.e., all rows have the same length)?
Brute Force Solution
Approach
The brute force approach explores every possible path from the starting point to the destination. It considers all combinations of obstacle removals along each path. Eventually it finds the path with the minimum number of obstacles removed.
Here's how the algorithm would work step-by-step:
- Imagine trying to walk through a maze, and you can only move right or down.
- Start at the top left corner.
- Try every single possible route you can take to the bottom right corner, one step at a time.
- For each route, count how many obstacles you had to remove along the way.
- Keep track of the number of obstacles removed for each route you try.
- Once you've tried every single route, compare the counts.
- The route with the lowest number of obstacles removed is your answer.
Code Implementation
def minimum_obstacle_removal_brute_force(grid):
rows = len(grid)
cols = len(grid[0])
min_obstacles = float('inf')
def explore_paths(row, col, obstacles_removed):
nonlocal min_obstacles
# Base case: Reached the destination
if row == rows - 1 and col == cols - 1:
min_obstacles = min(min_obstacles, obstacles_removed)
return
# Pruning: If current obstacles already exceed the minimum, stop
if obstacles_removed >= min_obstacles:
return
# Explore moving down
if row + 1 < rows:
new_obstacles = obstacles_removed + grid[row+1][col]
explore_paths(row + 1, col, new_obstacles)
# Explore moving right
if col + 1 < cols:
new_obstacles = obstacles_removed + grid[row][col+1]
explore_paths(row, col + 1, new_obstacles)
# Initiate the exploration from the start
initial_obstacles = grid[0][0]
explore_paths(0, 0, initial_obstacles)
return min_obstaclesBig(O) Analysis
Optimal Solution
Approach
The problem asks us to find the fewest obstacles to remove to reach the opposite corner of a grid. Instead of exploring every possible path, we'll use a method that prioritizes paths with fewer obstacles, gradually exploring the grid outwards from the starting point.
Here's how the algorithm would work step-by-step:
- Imagine you're starting at the top-left corner and need to reach the bottom-right corner. Every step you take either moves you to a clear spot or requires you to remove an obstacle.
- Think of this like exploring a maze, where you want to find the easiest route. We'll explore the grid outwards, layer by layer, from where we start.
- Keep track of the fewest obstacles you need to remove to reach each spot in the grid. Start by saying it takes zero obstacle removals to be at the start.
- Now, look at all the spots next to where you are. If you can move to a clear spot, the number of obstacle removals stays the same. If you have to remove an obstacle, the number increases by one.
- Always pick the path to a new spot that has the fewest obstacle removals. If there are ties, explore both.
- Keep going until you reach the bottom-right corner. The number of obstacle removals you've recorded at that corner is the answer.
Code Implementation
import heapq
def minimum_obstacle_removal_to_reach_corner(grid):
rows = len(grid)
columns = len(grid[0])
obstacle_removals = [[float('inf')] * columns for _ in range(rows)]
obstacle_removals[0][0] = 0
priority_queue = [(0, 0, 0)] # (cost, row, col)
heapq.heapify(priority_queue)
# Explore the grid using Dijkstra's algorithm.
while priority_queue:
cost, row, column = heapq.heappop(priority_queue)
if cost > obstacle_removals[row][column]:
continue
if row == rows - 1 and column == columns - 1:
return cost
directions = [(0, 1), (0, -1), (1, 0), (-1, 0)]
for row_change, column_change in directions:
new_row = row + row_change
new_column = column + column_change
if 0 <= new_row < rows and 0 <= new_column < columns:
# Determine the cost to move to the new cell.
new_cost = cost + grid[new_row][new_column]
# If the new cost is lower, update and enqueue.
if new_cost < obstacle_removals[new_row][new_column]:
obstacle_removals[new_row][new_column] = new_cost
heapq.heappush(priority_queue, (new_cost, new_row, new_column))
return -1 # Should not reach here if a path exists.Big(O) Analysis
Edge Cases
| Case | How to Handle |
|---|---|
| Null or empty grid | Return 0 if the grid is null or empty, as there's no path. |
| 1x1 grid (single cell) | Return the value of the single cell in the grid. |
| All cells are 0 (no obstacles) | Return 0 as no obstacles need removal. |
| All cells are 1 (only obstacles) | Return the sum of row and column sizes minus 2, as this is the minimum path length. |
| Grid with only one row or one column | Iterate through the single row or column and sum the obstacle values. |
| Maximum grid dimensions leading to potential memory issues (e.g., large priority queue) | Consider using a more memory-efficient data structure or algorithm if space complexity becomes problematic, possibly trading off some speed. |
| Integer overflow if grid dimensions are very large and the number of obstacles to remove is high. | Ensure appropriate data types are used to store the minimum number of obstacles removed (e.g., long long in C++) to avoid overflow. |
| Grid where the starting cell has an obstacle. | The algorithm should correctly account for the obstacle in the starting cell when determining the minimum obstacle removal cost. |